Що потрібно і коли?
ROS2 складається з багатьох бібліотек, усі з яких ви встановите під час навчання. Коли ви станете більш просунутими, ви будете розміщувати лише необхідні деталі там, де вони вам потрібні. Для початку вам знадобляться компілятори, інструменти командного рядка та симулятори. Для зовнішніх систем вам потрібно мати лише готові вузли та комунікаційне ядро системи. На ранніх етапах потрібно спробувати кілька прикладів і подивитися, як імітувати робота або навіть декількох роботів у дії. Ці інструменти доступні лише під час встановлення на робочому столі.
Як допомагає АФК?
Бібліотеки в ROS покликані надати вам багато стандартних функцій для роботизованих дій. Він має бібліотеки для роботи з датчиками, управління двигуном та багато іншого. Основна увага приділяється комунікації між вузлами, яка є основною концепцією кожної функції в рамках ROS.
У вас є варіанти!
Ви можете встановити пакет ros-base за допомогою улюбленого менеджера пакетів. Проблема полягає в тому, що ви можете використовувати багато версій системи ROS для різних проектів. Щоб уникнути цієї проблеми, використовуйте контейнер. Ви закінчите встановлення таким же чином, тільки всередині контейнера. Суть, зрештою, полягає в тому, що система ROS поставляється в декількох версіях, і вони можуть працювати лише на певній версії розповсюдження. Ось коротка таблиця:
| Ubuntu Ver. | Версія ROS2. | Версія ROS1. |
|---|---|---|
| 18.04 | красномовний | Мелодійний |
| 20.04 | Фокси | ноетичний |
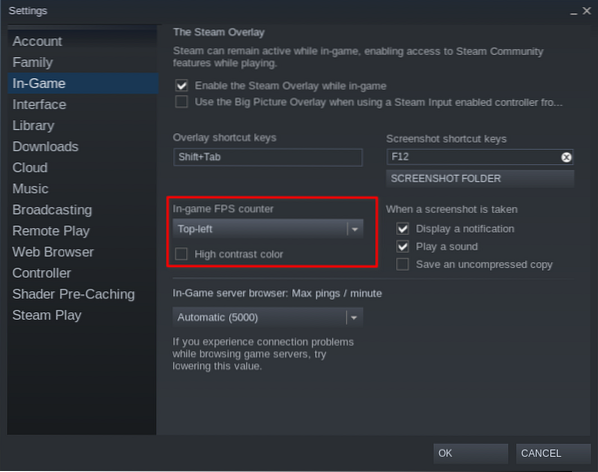
Є більше версій і більше залежностей, див. Список у вікі на ros.орг. Справа в тому, що ви повинні переконатися, що ваша установка підтримує версію ROS. ROS також широко використовує Python, вони тестують на Python 3 (і 2.7) щоб ви могли вибрати. Також вам доступне зображення докера, якщо вам це зручніше. Зображення названо ros: foxy-ros-base-focal.
Залежно від того, з чим ви працюєте, вам може знадобитися інший обсяг програмного забезпечення, що є другою причиною використання контейнерів. Як ви бачите в таблиці, можливо, вам також доведеться вибрати ROS1 або ROS2. Якщо ви використовуєте обидва варіанти, існує великий ризик, що налаштування заплутають речі для ваших компіляторів та інших інструментів. Кінець життя ROS1 - 2025, тому не починайте з ним нові великі проекти.
Багато деталей всередині
Операційна система робототехніки має багато підсистем. Ви повинні знати, який з них потрібен, і коли він повинен бути встановлений. Як тільки ви починаєте встановлення, ви стикаєтесь з тим, скільки ви хочете встановити. За замовчуванням ви будете використовувати ваш менеджер пакетів, щоб встановити весь дистрибутив. Це називається ros-desktop-full, у вас буде все, що вам може знадобитися. Це також займає багато місця на вашому диску.
Ядро ROS
Ядро ROS дає змогу компілювати ваші програми через клієнтські бібліотеки rclcpp та rclpy. Це два, які підтримують розробники ROS. Для інших мов існує більше клієнтів. Вони використовують API для створення послідовної поведінки на різних платформах. На цьому рівні також включені всі способи взаємодії вашої роботизованої системи.
База ROS
Рос-база включає багато інструментів для розробки, але не містить інструментів графічного інтерфейсу.
Робочий стіл ROS
Містить усі різні частини системи, включаючи безліч прикладів. Він також надає всі інструменти графічного інтерфейсу, включаючи симулятори та способи перевірки зв'язку між вузлами. Єдиними додатковими речами, які вам потрібні, будуть спеціальні драйвери та деякі додаткові реалізації i.e. синтаксичний аналізатор urdf.
Встановлення робочого столу ROS
Найпростіший спосіб встановити робочий стіл ROS - це використання apt для Ubuntu та інших дистрибутивів на основі Debian. На інших дистрибутивах вам потрібно будувати його самостійно. Коли ви це зробите, результат поміщається в єдину структуру каталогів. Це означає, що вам потрібно буде ініціалізувати це середовище, вибравши файл налаштування. Видалення полягає в тому, щоб видалити структуру каталогів і припинити пошук файлу налаштування. Джерело пошуку вам також потрібно буде робити з пакетами Debian.
Пакети ROS2 доступні як їхнє сховище у їхньому сховищі. Щоб додати це до своєї системи, скопіюйте їх ключ.
curl -s https: // raw.вміст githubuser.com / ros / rosdistro / master / ros.asc | sudo apt-key add -А потім додайте їх сховища.
sudo sh -c 'echo "deb [arch = $ (dpkg --print-architecture)]http: // пакунки.рос.org / ros2 / ubuntu $ (lsb_release -cs) main "
> / etc / apt / sources.список.d / ros2-остання.список '
Після цього ви можете оновити та встановити бібліотеки.
sudo apt оновленняsudo apt встановити ros-foxy-desktop
Коли все це встановлено, вам потрібно ініціалізувати середовище в запущеній оболонці.
source / opt / ros / foxy / setup.башДодайте цей рядок до вашого .bashrc, тому всі виклики bash готові до роботи. Тут також корисно використовувати контейнер Linux. Коли у вас є кілька проектів, що використовують різні версії, краще створити віртуальну машину лише для 'Foxy' та ще одну для кожного, що вам потрібно.
Висновок
Незважаючи на те, що основна установка проста для ROS2, вам слід точно визначити, що ви хочете. Якщо ви залишаєтеся з одним дистрибутивом, у вас не виникає проблем, але ви починаєте використовувати багато версій і у вас виникають ускладнення.